-
M5Stack Atom Liteのスリープ時の消費電力を測ってみた
今年はM5Stack Atom Liteで給水ポンプを制御する水やり装置を作ってみようとしましたが、7日経たず…
-
IoTデータ 可視化サービスAmbientにENV III UNITのデータを送る
以前から触ってみようと思ってやっていなかったIoTデータを可視化するサービスAmbientを試してみました。 …
-
M5Stack ENV III Unit 温湿度気圧センサ (SHT30+QMP6988) の使い方
M5Stack ENV III Unit 温湿度気圧センサー (SHT30+QMP6988) の使い方のメモに…
-
ESP32で回路を追加せずを使って電源電圧を計測する
ESP32で追加回路なしで電源電圧を計測する方法について解説します。 ESP8266であればESP.getAc…
-
obniz Board 1Yで自動水やりの屋外対応版を工作してみた
昨年から夏は庭で野菜をプランターで栽培してるので家を空けたときにも心配要らないように、obniz Board …
-
obnizでTTLシリアルJPEGカメラでハマって解消したメモ
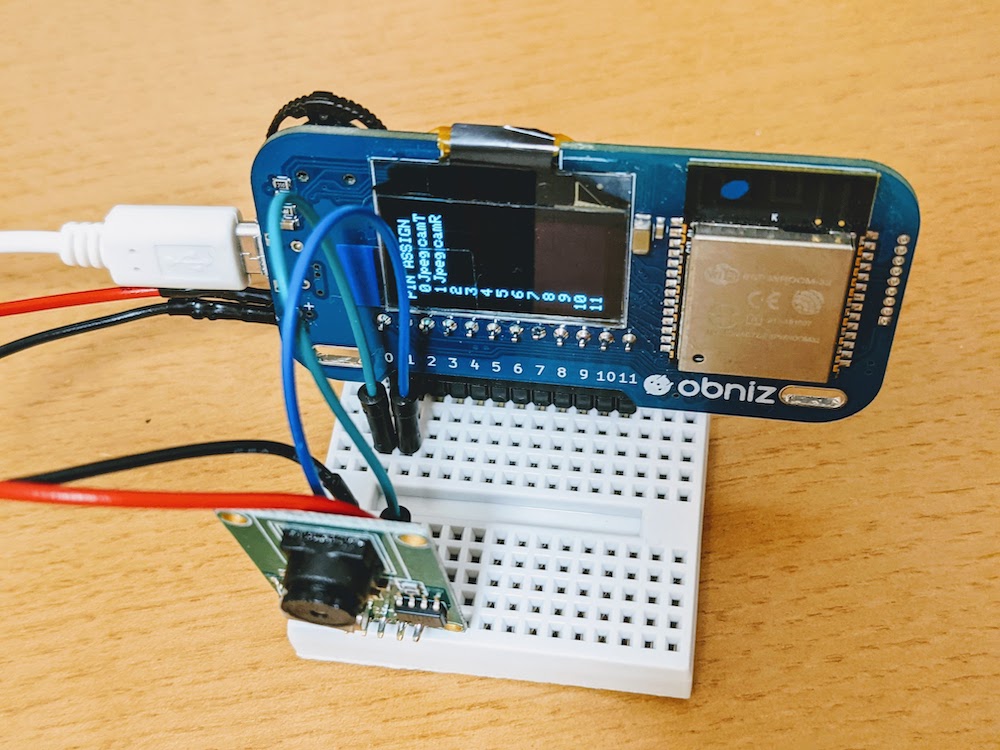
だいぶ前にAdafruitのJpegカメラを秋月電子通商で購入してobnizで試したんですが「あれ全然撮れない…
-
距離センサー VL53L0X の使い方 (Arduino、ESP32)
スイッチサイエンスで、PololuのVL53L0Xモジュールを購入してArduinoとESP32で試してみたメ…
-
Amazon FreeRTOS ESP32-DevKit-CでMQTT Hello World (Mac版)
Amazon FreeRTOSをESP32開発ボードESP32-DevKit-Cにセットアップして、マイコンか…
-
小型のMP3プレーヤーモジュールDFPLayerの使い方
コピペテックで技術書典Vol8向けに書いた「ESP32 と obnizOS で作る IoT 電子工作」で使った…
-
NeoPixelリングに使えるエフェクト実装例集
NeoPixelリングに使えそうなエフェクトをいろいろと自作してみました。 テープ状のLEDとリング上のLED…